|
||
|
|
||
| 元 智 大 學 | 工業工程所 81級 | 簡正元 碩士 |
|
|
||
|
摘 要
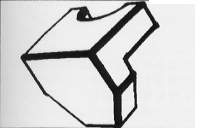
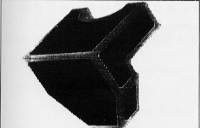
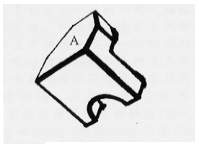
本論文主要的目的在於利用單一鏡頭及單一個視角(view)的機器視覺技術來辨識三度空間(3D)的工件。之所以採用單一鏡頭的目的乃是為節省設備的成本及降低複雜的座標轉換(對多鏡頭而言更複雜)進而減少了辨識工件所須的時間,加快了辨識的速度。本論文所探討的工件乃是經由人工或機器所製造出來的工件,其工件具有一般的幾何特性。當攝影機由鏡頭擷取一張工件的影像後其將與一個以模型為基(model-based)的資料庫(database)相比對(matching),最後以其在資料庫中最相似的模型做為我們所欲得到辨識的工件。
對於三度空間工件辨識的方法,首先我們假設已由使用圖案投影法(structured lighting)的方法獲取工件的邊,再對其工件的影像做三極化的動作。利用標記法(labeling method)將三度空間待測工件的各個可見(visible)面由影像中萃取出來,並產生一個各面間毗鄰關係的毗鄰矩陣(adjancency matrix)。由於使用單一鏡頭及單一視角的關係,當工件表面正交向量(normal vector)和觀測物件的觀測軸無法平行時,此時影像將產生扭曲(skew)。我們利用一種對投影不變的圖形正規化(skew normalization)方法對各個萃取出來的面做正規化,使其成為緊密的圖形(compact shape)而與視角無關(view-point invariant)。之後我們對這些待測面與標準物資料庫中的標準面做比對,並利用各面間毗鄰的關係做全域性的限制,比對後將產生一個決策權重累加值,最後根據決策權重累加值來做決策,判別該測試工件是屬於標準物資料庫中的那一個工件。
關鍵詞:三度空間工件辨識,單一視角,圖形正規化,毗鄰矩陣、決策權重累加值。
|
|||||||||||